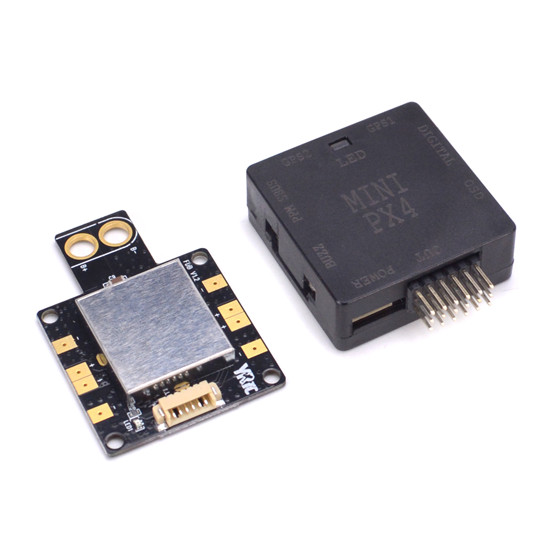
MINI PIX Pixhawk 2.4. 8 PX4 Autopilot PIX 2.4.8 32Bit Flight Controller with Power Module Buzzer for Racing Drone Helicopter
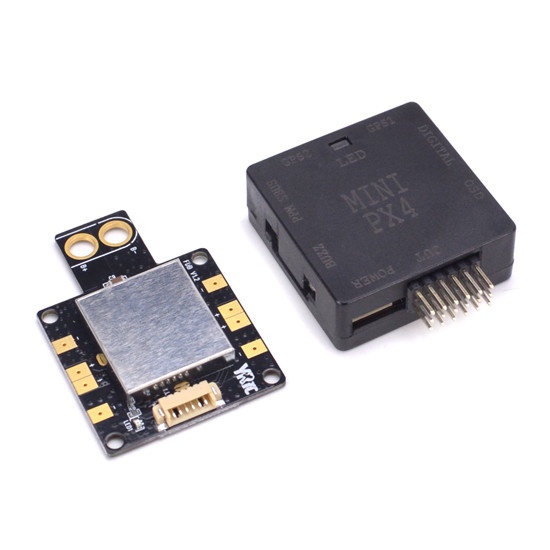


MINI PIX Pixhawk 2.4. 8 PX4 Autopilot PIX 2.4.8 32Bit Flight Controller with Power Module Buzzer for Racing Drone Helicopter
FMU Processor: SMT32f407(32bit Arm Cortx-M7 168Mhz)
Sensor:
Gyroscope: ICM-20689
Accelerometer: ICM-20689
Barometer: MS5607
Compass: IST8310
Support for three at most, 1 x Compass with built-in, 2x External support two at most.
Interface Type CH1.25
GPS UART X2 (Support for Dual GPS)
Telemetry UART X2
I2C X1 (extended support)
PWM Output X6
RC in signal Input PPM/SBUS
Current Voltage Input X1
Servo BEC Input X1
USB X1
SPI X1
Working environment and physical parameters(Working Condition and physical parameters):
USB Voltage 5V+-0.4V
PM Module Input Voltage 5V+-0.4V
Servo Input voltage 5-16V
FC voltage 5V
Temperature range -40-85*c
Size&Weight
Size : L*W*H 36*36MM(PCB only )
Weight: 9g(FC Board only)
1 x MINI PIX Pixhawk 2.4. 8 PX4 flight controller
1 x Power module
1 x buzzer
1 x cables